Lesson 2 - The Scramble for Africa.
|
|
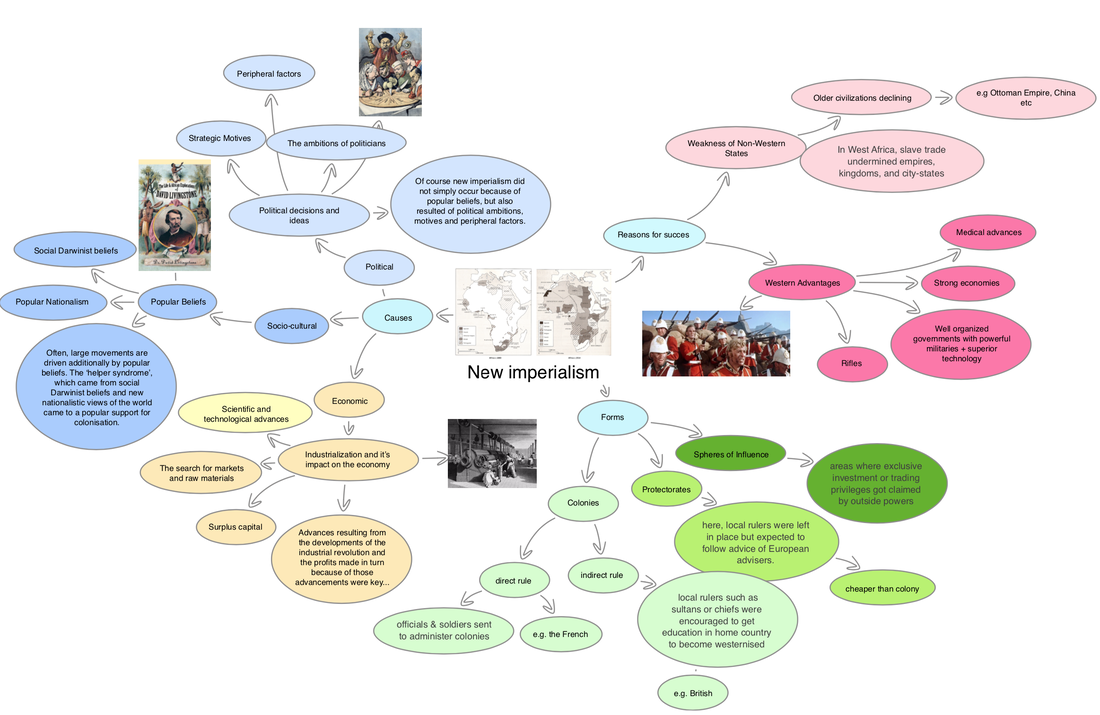
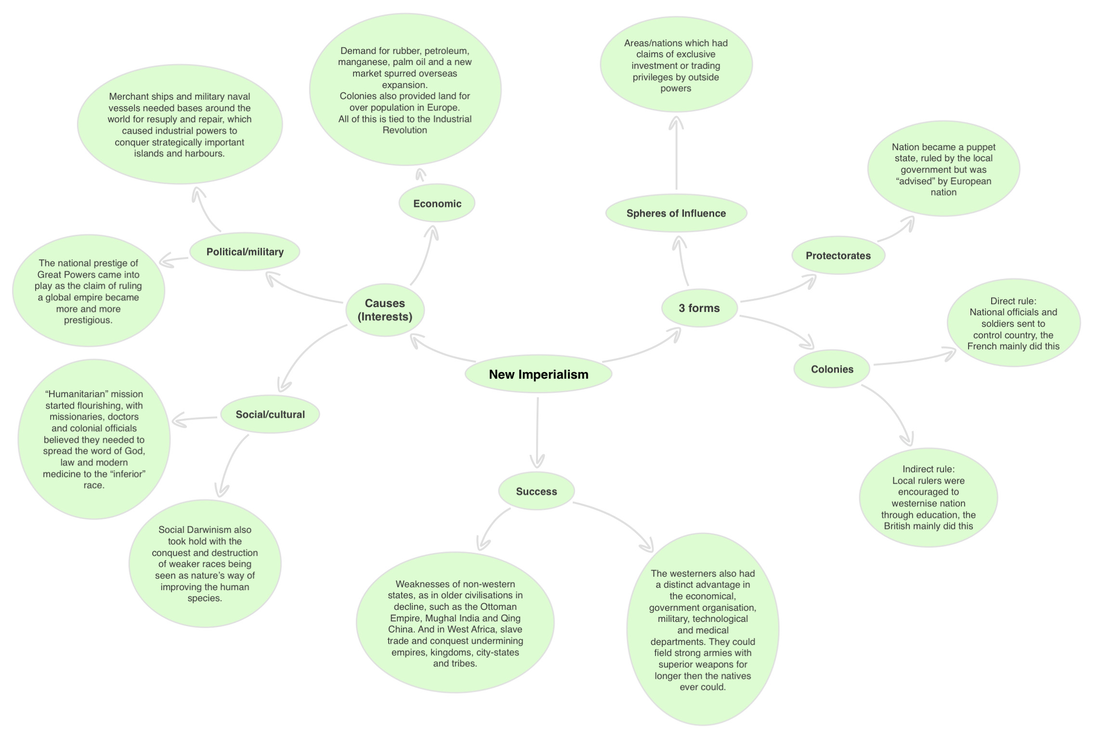
Causes of the new imperialism: Three factors
|
3. Social and cultural interests - Humanitarian goals - missionaries, doctors, colonial officials believed they had a duty to spread western civilisation (medicine, law, Christianity... football, golf and cricket) also social Darwinism - many Westerners believed in their racial superiority, the idea that Europeans were superior to all others. Imperial conquest/destruction of weaker races was nature's way of improving the human species.
The Success of Western Imperialism - 1870-1914
Imperialist nations gained control over much of the world - reasons for their success:
Imperialist nations gained control over much of the world - reasons for their success:
- Weakness of Non-Western States - older civilisations were in decline (Ottoman Middle East, Mughal India, Qing China) and in West Africa, slave trade undermined empires, kingdoms, and city-states
- Western Advantages: strong industrial economies, well-organised governments with powerful militaries (see battle of Rorke's Drift 1879 below) and superior technology, medical advances (for example: quinine - medicine to fight malaria) and rifles, Maxim gun - early machine gun.
|
|
|
Forms of Imperial Rule
- Colonies (a) direct rule - officials & soldiers sent to administer colonies (French) (b) indirect rule - sultans, chiefs, other local rulers were encouraged to get education in home country to become westernised (British)
- Protectorates - local rulers left in place but were expected to follow advice of European advisers. Cheaper than running a colony.
|
|
3. Spheres of Influence - areas in which outside powers claimed exclusive investment or trading privileges. This form of economic imperialism did not necessarily involve any direct political or military control and the motivation may have lacked any social or cultural dimension. But over time governments were often forced into supporting (militarily) national economic interests and the cultural and social consequences of this economic trade might be as profound as anything resulting from direct political rule e.g. football in south America. This film about the British in Argentina is an example of a British sphere of influence. (Europeans also created them in China and the U.S.A. in Latin America)
|
Activity 1
Design a revision diagram or mind map about this introduction to 'New Imperialism: causes, success and forms'. It must be no more than one side of A4, visually interesting and cover each of the three themes identified above. Be inspired by some creative examples from previous years below. (Click to enlarge)
Design a revision diagram or mind map about this introduction to 'New Imperialism: causes, success and forms'. It must be no more than one side of A4, visually interesting and cover each of the three themes identified above. Be inspired by some creative examples from previous years below. (Click to enlarge)
|
Colette
|
Sydney
|
Josh
|
Imperialism in Africa
The origins of European colonisation in Africa are closely tied to the Slave Trade. By the early 1800s, Europeans had outlawed transatlantic slave trade, but East African slave trade continued. In 1787 Britain organised Sierra Leone in West Africa as colony for former slaves and in 1847 Liberia became an independent republic (settled by free blacks from the U.S.)
Africa known as the "dark continent" because little was known about its interior, rivers were difficult to manoeuvre and disease kept many Europeans from venturing far) Missionaries tried to spread Christianity and spoke out against slavery, they built schools, churches, medical clinics. The relationship was perceived as paternalistic they saw Africans as children in need of guidance.
Explorers:
1805 - Mungo Park, Scottish doctor seeks source of Niger River.
1858 - Richard Burton, English adventurer, discovers Lake Tanganyika.
1850-60s - David Livingstone, Scottish missionary explores Africa.
1869 - Henry Stanley, Welsh journalist. Sets out to find Livingstone.
1871 - Stanley finally tracks Livingstone down in Tanzania. Greets him with now-legendary line: “Dr. Livingstone, I presume.”
1870s - Pierre Savorgnan de Brazza
The origins of European colonisation in Africa are closely tied to the Slave Trade. By the early 1800s, Europeans had outlawed transatlantic slave trade, but East African slave trade continued. In 1787 Britain organised Sierra Leone in West Africa as colony for former slaves and in 1847 Liberia became an independent republic (settled by free blacks from the U.S.)
Africa known as the "dark continent" because little was known about its interior, rivers were difficult to manoeuvre and disease kept many Europeans from venturing far) Missionaries tried to spread Christianity and spoke out against slavery, they built schools, churches, medical clinics. The relationship was perceived as paternalistic they saw Africans as children in need of guidance.
Explorers:
1805 - Mungo Park, Scottish doctor seeks source of Niger River.
1858 - Richard Burton, English adventurer, discovers Lake Tanganyika.
1850-60s - David Livingstone, Scottish missionary explores Africa.
1869 - Henry Stanley, Welsh journalist. Sets out to find Livingstone.
1871 - Stanley finally tracks Livingstone down in Tanzania. Greets him with now-legendary line: “Dr. Livingstone, I presume.”
1870s - Pierre Savorgnan de Brazza
|
|
|
Activity 2 - Livingstone and Stanley - Research challenge
1. How and why David Livingstone become famous in Britain in the 1840s and 1850s?
2. Why did Livingstone return to Africa in 1866?
3. How long did it take Stanley to find Livingstone?
4. What did Stanley say after saying 'Dr. Livingstone I presume?'
5. What was the title of the best selling book written by Stanley about his journey to find Livingstone?
1. How and why David Livingstone become famous in Britain in the 1840s and 1850s?
2. Why did Livingstone return to Africa in 1866?
3. How long did it take Stanley to find Livingstone?
4. What did Stanley say after saying 'Dr. Livingstone I presume?'
5. What was the title of the best selling book written by Stanley about his journey to find Livingstone?
A Scramble for Colonies
Belgian King Leopold II hired Henry Stanley to explore the Congo River basin and to arrange trade treaties with African leaders. He hoped for conquest and profit and his activities in the Congo set off a rush (scramble) by other European nations to acquire territories in Africa.
Berlin Conference 1884-5 - The European powers met to decide how to carve up Africa - no Africans were invited. They recognised Leopold’s claim to the Congo Free State but called for free trade on Congo and Niger rivers. It was agreed that no European powers couldn't claim any part of Africa without first setting up a government office there.
Belgian King Leopold II hired Henry Stanley to explore the Congo River basin and to arrange trade treaties with African leaders. He hoped for conquest and profit and his activities in the Congo set off a rush (scramble) by other European nations to acquire territories in Africa.
Berlin Conference 1884-5 - The European powers met to decide how to carve up Africa - no Africans were invited. They recognised Leopold’s claim to the Congo Free State but called for free trade on Congo and Niger rivers. It was agreed that no European powers couldn't claim any part of Africa without first setting up a government office there.

Within 20 years, most of the continent had been partitioned by European powers:
Within 20 years, most of the continent had been partitioned by European powers:
- The Congo - The people of the Congo were exploited as forced labourers, as were its natural resources (copper, rubber, ivory).
- French Expansion - From the 1830s France set out conquer Algeria in the late 1800s Tunisia came under French control, as did much of West and Central Africa. French empire was the size of continental U.S.A.
- The British took the Cape Colony from the Dutch – Boers (Dutch settlers) moved north - where they found gold and diamonds. In 1882, Britain established a protectorate over Egypt.
- Portugal established colonies in Angola and Mozambique.
- Italy took control of Libya, Italian Somaliland, and Eritrea, which is the north-most province of Ethiopia, near the Red Sea. Italy’s efforts to gain control of Ethiopia ended in bitter defeat. (Important for later study of Mussolini's Italy)
- Germany takes lands in eastern and southwestern Africa for its “place in the sun.”
Activity 3 - A case-study of Rhodesia
|
|
Watch this short extract about the Scramble for Africa in Britain. 1. What motivated Cecil Rhodes in his imperial activities? 2. How were the British able to conquer and control such large areas of southern Africa? 3. What were the 'positive' consequences of British rule in Africa. |
Extension
Ever wondered what it is like to study history at university? Professor Richard Evans (Oxford) and John Merriman (Yale) give you a taste.
Ever wondered what it is like to study history at university? Professor Richard Evans (Oxford) and John Merriman (Yale) give you a taste.
|
|
|