Year 9
Unit 1 - Bronze Age Greece
|
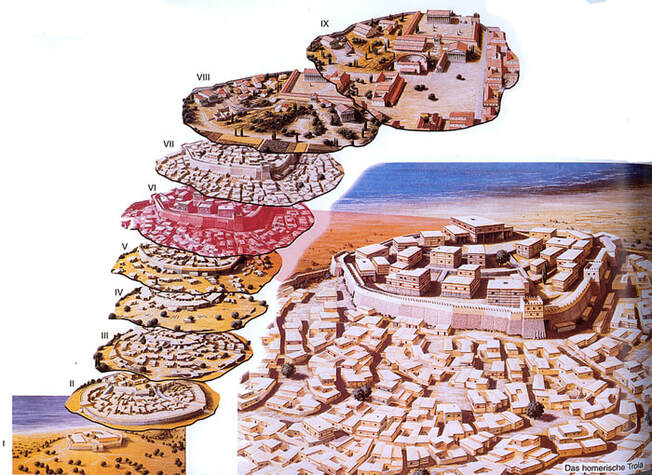
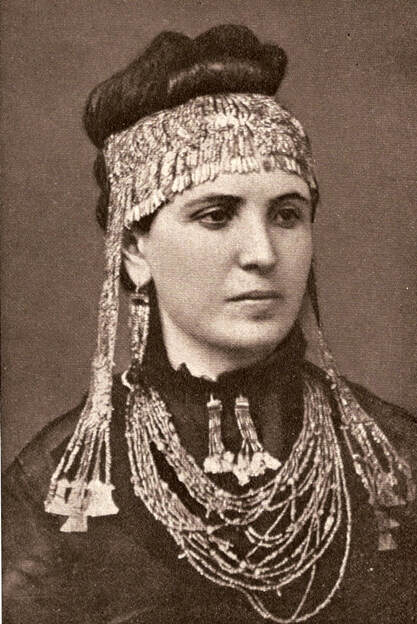
Schliemann famously uncovered gold jewellery at the site and had his wife photographed wearing the ‘Jewels of Helen’ (right). It generated a lot of publicity but in reality, the gold came from a much earlier period. Part of what makes the excavation of Hisarlik difficult is that there are at least nine cities built on top of one another. This makes it difficult to distinguish one civilisation from the next. (see below)
|
|
|
Activities
|
|